- live demo expands the Vulkan implementation to support micromaps for ray-traced shadows
- explains the concept of micromaps and what MeshOptimizer supports
- followed by showing the full implementation integration process on the C++ and shader side

- introduces a wave tracing framework that extends classical path integrals to capture coherent wave effects
- explains the key tradeoff between locality and incoherence when moving beyond geometric optics
- evaluates bilinear path integral methods that let particles interact
- evaluates the accuracy of microfacet models using measured metal sample profiles and photographs
- shows limitations of current microfacet models, such as broad roughness ranges and at grazing angles

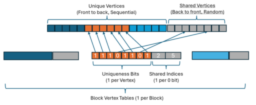
- presents DGF SuperCompression as a new feature of the Dense Geometry Format
- This layer aims to cut storage size by 20% while preserving exact block reconstruction
- compresses cluster-granular triangle clusters with shared-vertex deduplication, delta/zig-zag encoding, and compact geometry ID tables for both DGF and meshlet decode flows
- enables a common asset format for DGF-capable and non-DGF devices with smaller disk/download footprints and fast CPU decode performance
- introduces a neural precomputed lens transport that allows the simulation of Fresnel throughput for accurate lens systems
- uses a classifier-regressor architecture to separate valid ray paths from occluded ones, enabling lens flare and depth-of-field rendering without discontinuities
- demonstrates order-of-magnitude speedups over brute-force ray tracing while preserving accurate results on realistic lens configurations

- introduces cuda-oxide Rust-to-CUDA compiler
- The book presents writing idiomatic Rust GPU kernels that compile directly to PTX
- emphasizes Rust’s ownership and type system, async execution, and SIMT compiler support kernel annotations
- presents an overview of Dense Geometry Format, an open block-based geometry compression standard
- developed for reducing ray tracing and mesh-LOD memory usage
- announces a multivendor Vulkan DGF extension partnership with Samsung

- explains flow maps as a generalization of diffusion models that predict any point on a path between noise and data rather than only local tangent directions
- shows how flow maps can enable faster or single-step sampling and better steerability
- organizes the topic around compositionality, Lagrangian consistency, and Eulerian consistency, and relates flow maps to consistency models and mean-flow parameterizations

Thanks to Jasper Bekkers for support of this series.
Would you like to see your name here too? Become a Patreon of this series.
